





Описание
Легкая DriverExamples
Образец Кода и проектов, чтобы получить ваш шаг!
Описание:
Много людей get заставляют их работать просто отлично в их проекта. Но некоторые нет, и я думаю, что было бы хорошей идеей написать некоторые простые инструкции для того, чтобы ваш легкий драйвер работает как можно быстрее и как можно быстрее.
Все эти примеры будут сделаны с помощью моего легкого водителя и BigEasy Драйвер шагового двигателя платы вождения несколько различных шагового двигателя s я валяется вокруг лаборатории. Я буду генерировать импульсы шага и направления с anarduinounoandachipkituno32, хотя все эти примеры должны работать с любым Arduino orArduino Клон или Arduino совместимый (как и все чипкитборды).
И не забудьте почитать Дэн Томпсон 'sexcellenteasydriver tutorial blog postifyou хотите почитать больше об этом. На некоторые отличные вопросы отвечено в комментариях в этом блоге.
Примечание 1: Все примеры будут работать равномерно с простыми драйверами или большими драйверами EasyDriver.
Примечание 2: Все примеры будут работать на Arduino, а также на платах чипсетов (и некоторые будут работать гораздо лучше на чипсетах из-за PIC32speed)
Примечание 3: Все примеры показывают бочкообразный разъем для ввода питания-Вам нужно как-то поставить питание на EasyDriver, но это не нужно bea бочкообразный разъем. У вас должен быть блок питания, который может выводить сомакет от 5 В до 30 В, на 1 Ампер или более.
Пример 1: Базовая Настройка Arduino
Thisis самый основной пример вы можете иметь с Arduino, EasyDriver и шаговый двигатель. Подключите четыре провода мотора к быстрому водителю (обратите внимание на правильность подключения катушки), подключите блок питания 12 В к питанию в штырях, и подключите arduino-sgnd, pin 8 и pin 9 для легкого драйвера.

Затем загрузите этот эскиз и выполните его на Arduino orchipKIT:
Void setup () { PinMode (8, выход); PinMode (9, выход); Цифровая запись (8, низкая); Цифровая запись (9, низкий); } Void loop () { Цифровая запись (9, высокая); Задержка (1); Цифровая запись (9, низкий); Задержка (1); }Это не намного проще. Что делает код? Это setsup pin 8 и 9 как выходы. Для начала установите их оба ниже. Затем в основном цикле просто Переключайте pin 9 high и low, ожидая 1 мс между переключениями. Мы используем pin 9 в качестве ступенчатого управления и pin 8 в качестве управления направления для легкого водителя.
Sincewe не тянет или MS1 или MS2 низкая на легкой драйвер низкая, легко Драйвер по умолчанию будет 1/8th microstep режим. Что означает, что каждый раз, когда "digitalWrite (9, дальний свет);" call выполнена, thestepper Мотор будет двигаться 1/8th полный шаг. Таким образом, если ваш двигатель составляет 1,8 градуса за шаг, будет 200 полных шагов за революцию, или 1600 микрошагов перерастава.
Как быстро этот код будет работать с шаговым устройством? Что ж, при STEPsignal 1 мс высокое и 1 мс низкое, каждый Полный Пульс займет 2 мс времени. Так как в 1 секунду 1000 мс, то 1000/2 = 500 микрошагов в секунду.
Что мы хотели, чтобы мотор был медленнее? Мы меняем задержку (); linesto имеет более длинные задержки. Если вы используете задержку (10); для обоих, вы двигаетесь на 50 микрошагов в секунду.
Как вы хотели, чтобы мотор был быстрее? Мы не можем задержать менее 1 MS, не так ли? Да, конечно, мы можем! Мы можем изменить delayMicroseconds () на delayMicroseconds (100); звонки и затем каждый delayбудет 100 микросекунд (или нас), таким образом, мотор будет управляться at5000 микрошагов/секунду.
Теперь, одна вещь, с которой вы должны играть, это текущий регулировочный горшок для вашего легкого водителя. Вам нужен маленький шуруповерт, чтобы повернуть его, и убедитесь, что он не слишком далеко в ту или иную сторону (они будут деликатны). Кроме того, некоторые легкие драйверы были построены с кастрюлями, которые haveno физически останавливается на них, так что они вращаются вокруг и вокруг. Как ваш код выше, медленно поверните кастрюлю так или иначе. В зависимости от типа мотора, который у вас есть (и его Сопротивления Катушки) вы можете услышать/не чувствовать разницы, когда вы крутите горшок, или вы можете заметить довольно большую разницу.
Пример 2: движение вперед и назад
Если взять пример 1, и просто немного изменить эскиз, мы будем перемещать некоторое количество шагов вперед или назад. Likeso:
Int Distance = 0;/запишите количество шагов, которые мы сделали Void setup () { PinMode (8, выход); PinMode (9, выход); Цифровая запись (8, низкая); Цифровая запись (9, низкий); } Void loop () { Цифровая запись (9, высокая); DelayMicroseconds (100); Цифровая запись (9, низкий); DelayMicroseconds (100); Расстояние = расстояние + 1;/запишите этот шаг /Проверьте, находимся ли мы в конце нашего хода Если (расстояние = 3600) { /У нас! Обратное Направление (инвертирующий Сигнал DIR) Если (digitalRead (8) = низкий) { Цифровая запись (8, высокая); } Другое { Цифровая запись (8, низкая); } /Сбросить наше расстояние до нуля, так как мы /Запуск нового хода Расстояние = 0; /Теперь пауза на полсекунды Задержка (500); } }Теперь, используя этот эскиз, мы двигаемся в течение 3600 шагов в одном направлении, для паузы и 3600 шагов в другом направлении. Я уверен, что вы можете понять, как сделать много различных шагов сейчас. И вы можете изменить задержку между шагами для каждого перемещения, чтобы происходит отдельно от скорости.
Пример 3: использование предварительно встроенной библиотеки-AccelStepper
Одна вещь, приведенные выше примеры не могут сделать хорошо, это обрабатывать несколько steppersот того же Arduino или chipKIT. Кроме того, ускорение и замедление также являются сложными. Другие люди столкнулись с этой проблемой, и теперь у нас есть библиотеки, которые мы можем скачать и установить в Arduino IDE или MPIDE, чтобы исправить эти проблемы.
Загружайте zip-файл для библиотеки AccelStepper fromthispage. Распакуйте загруженный файл и поместите AccelStepper в папку thelibraries в вашем каталог установки Arduino. Обратите внимание, что пользователи forMPIDE (chipKIT), вам нужно копировать файл AccelStepper в оба папки libraries на верхнем уровне, а также ashardwarepic32libraries, так что обе стороны AVR и PIC32 могут использовать его.
Используя то же оборудование из примера 1, перезагрузите IDE и введите следующий эскиз:
# Включают в себя /Определите шаговый и штырьки, которые он будет использовать AccelStepper stepper (1, 9, 8); Int pos = 3600; Вакуум установка () { Шаговый. setMaxSpeed (3000); Шаговый разгон (1000); } Силы петли () { If (шаговый. Дистанцетого () = 0) { Задержка (500); Pos =-pos; Шаговый. moveTo (pos); } Шаговый. Запуск (); }Этот код делает то же самое, что и пример 2, но использует Ускорение/замедление с помощью библиотеки AccelStepper и работает в два раза больше шагов. (Спасибо г-н Даффи за то, что указывал на этот факт!) причина, по которой он работает в два раза больше шагов, потому что мы делаем "pos =-pos", чтобы держать вещи короткими и простыми. Это означает, что он будет работать от 0 до 3600, затем от 3600 до-3600 (это 7200 шагов).
ПРИМЕР 4: запуск нескольких шаговых двигателей
Одна из отличных вещей в базе AccelStepper состоит в том, что вы можете запускать как можно больше шаговых двигателей, как вы хотите, в то же время, просто делая больше AccelStepper объектов. Теперь, если вы попытайтесь выполнить их toofast, шаги не будут гладкими, так что вы должны быть осторожны, не toload вниз Arduino слишком много. ChipKIT не имеет этой проблемы, потому что это гораздо быстрее, чем Arduino.
В этой схеме у нас теперь есть два простых драйвера и два шаговых мотора. Нам просто нужно еще 2 контакта от Arduino, чтобы добавить этот второй мотор.
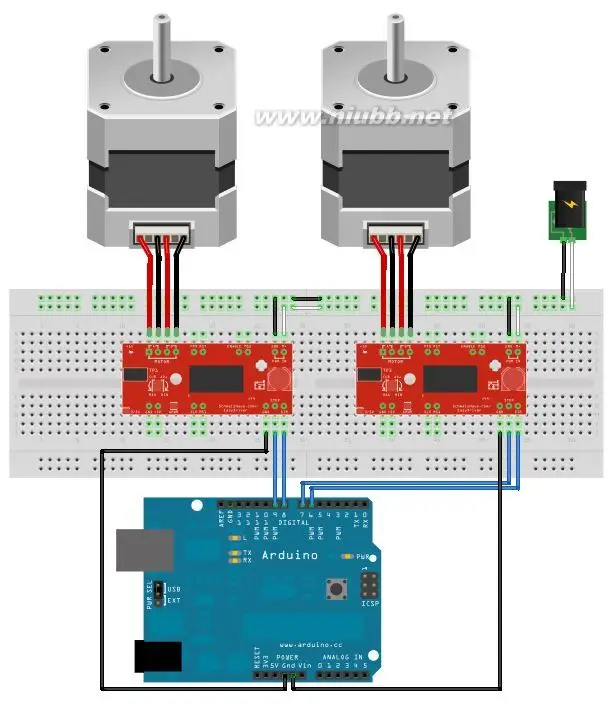
Код для данного примера:
# Включают в себя /Определение двух степперов и штифтов, которые они будут использовать AccelStepper stepper1 (1, 9, 8); AccelStepper stepper2 (1, 7, 6); Инт пос1 = 3600; Инт пос2 = 5678; Вакуум установка () { Шаг 1. Набор maxspeed (3000); Шаг 1. Setacceleration (1000); Stepper2.setMaxSpeed (2000); Шаг 2. Ускорение (800); } Силы петли () { If (шаг 1. Дистанцетого () = 0) {Пос1 =-пос1;
Шаг 1. MoveTo (пос1); } If (шаг 2. Дистанцетого () = 0) { Пос2 =-пос2; Шаг 2. MoveTo (пос2); } Stepper1.run (); Stepper2.run (); }
Если вы используете этот код, вы можете найти, что ускорение и замедление не так гладко, как с одним двигателем (на anArduino-снова, эта проблема не происходит на чипкете) -Это потому, что наши две максимальные скорости (3000 и 1000) довольно высоки, что позволяет процессору обрабатывать их. Выход один-tomake ваш Макс скорость ниже, а затем перейти от 1/8th microstepping to1/4, половина или полный шаг режим. Если сделано правильно, вы увидите скорость вращения sameshaft, но с меньшей нагрузкой на ЦП (потому что вы генерируете как можно больше шагов в секунду.)
Вы можете увидеть, что для этого примера я просто скопировал и вставил код из примера 3 и сделал два положения и две steppers. Этот код очень прост и не очень полезен, но вы можете ознакомиться с существующими примерами из библиотеки AccelStepper и переработать страницы справки по различным функциям, и получите хорошие идеи о том, что еще вы можете сделать с вашим шаговым управлением.
Ссылки:
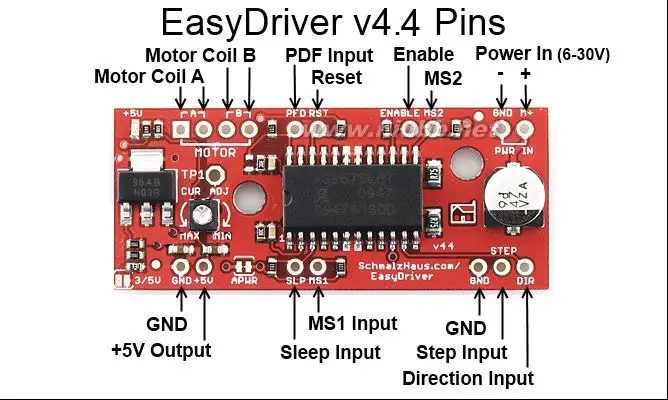
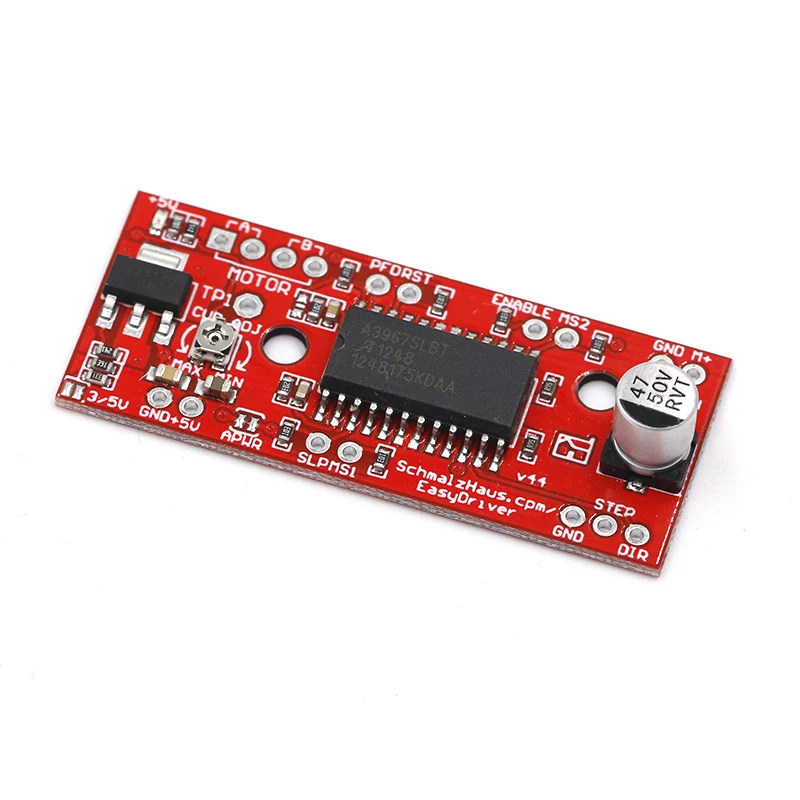
Легкая DriverPinout:



Характеристики
- Тип
- Другая
- Номер модели
- A3967 EasyDriver
- Индивидуальное изготовление
- Да
Сопутствующие товары








